Seismic Refraction Surveying
Applied
Seismology
Earthquake
Seismology
Recordings of distant or
local earthquakes are used to infer earth structure and faulting characteristics.
Applied
Seismology
A signal, similar to a
sound pulse, is transmitted into the Earth. The signal recorded at the surface
can be used to infer subsurface properties. There are two main classes of
survey:
- Seismic Refraction: the signal returns to the
surface by refraction at subsurface interfaces, and is recorded at
distances much greater than depth of investigation.
- Seismic Reflection: the seismic signal is reflected
back to the surface at layer interfaces, and is recorded at distances less
than depth of investigation.
History of Seismology
Exploration seismic methods developed from early work on
earthquakes:
- 1846: Irish physicist, Robert
Mallett, makes first use of an artificial source in a seismic
experiment.
- 1888: August Schmidt
uses travel time vs. distance plots to determine subsurface seismic
velocities.
- 1899: G.K. Knott
explained refraction and reflection of seismic waves at plane boundaries.
- 1910: A. Mohorovicic identifies
separate P and S waves on traveltime plots of distant earthquakes, and
associates them with base of the crust, the Moho.
- 1916: Seismic refraction developed to locate artillery
guns by measurement of recoil.
- 1921: ‘Seismos’ company founded to use seismic
refraction to map salt domes, often associated with hydrocarbon traps.
- 1920: Practical seismic reflection methods developed.
Within 10 years, the dominant method of hydrocarbon exploration.
Applications
Seismic Refraction
- Rock competence for engineering applications
- Depth to Bedrock
- Groundwater exploration
- Correction of lateral, near-surface, variations
in seismic reflection surveys
- Crustal structure and tectonics
Seismic Reflection
- Detection of subsurface cavities
- Shallow stratigraphy
- Site surveys for offshore installations
- Hydrocarbon exploration
- Crustal structure and tectonics
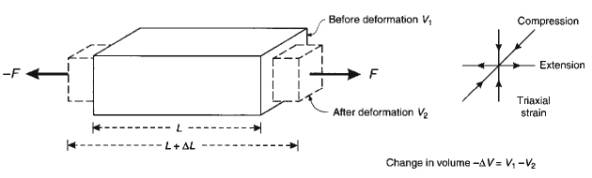
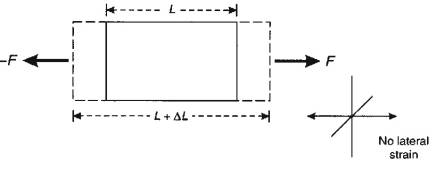
Stress and Strain
A force applied to the surface of a solid body creates internal
forces within the body:
- Stress is the ratio of applied force
F to the area across which it is acts.
- Strain is the deformation caused in
the body, and is expressed as the ratio of change in length (or volume) to
original length (or volume).
Triaxial Stress
Stresses act along three orthogonal axes, perpendicular to
faces of solid, e.g. stretching a bar:
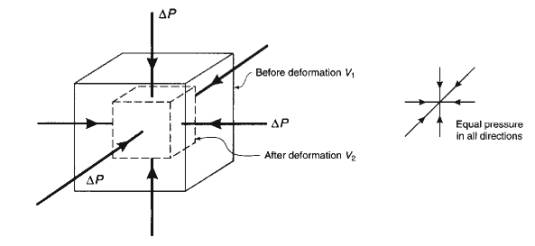
Pressure
Forces act equally in all directions perpendicular to faces
of body, e.g. pressure on a cube in water:
Strain Associated with Seismic Waves
Inside a uniform solid, two types of strain can propagate as
waves:
Axial Stress
Stresses act in one direction only, e.g. if sides of bar
fixed:
- Change in volume of solid occurs.
- Associated with P wave propagation
Shear Stress
Stresses act parallel to face of solid, e.g. pushing along a
table:
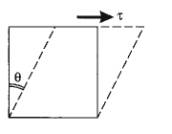
- No change in volume.
- Fluids such as water and air cannot support
shear stresses.
- Associated with S wave propagation.
Hooke’s Law
Hooke’s Law essentially states that stress is
proportional to strain.
- At low to moderate strains: Hooke’s Law applies and a
solid body is said to behave elastically,
i.e. will return to original form when stress removed.
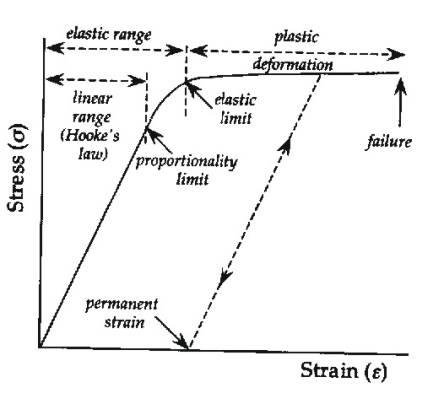
- At high strains: the elastic limit is exceeded and a body deforms in a plastic or ductile
manner: it is unable to return to its original shape, being permanently strained,
or damaged.
- At very high strains: a solid will fracture, e.g. in
earthquake faulting.
Constant of proportionality is called the modulus, and is ratio of stress to strain, e.g. Young’s modulus in triaxial strain.
Seismic Body Waves
Seismic waves are pulses of strain energy that propagate in
a solid. Two types of seismic wave can exist inside a uniform solid:
A) P waves (Primary, Compressional, Push-Pull)
Motion of particles in the solid is in direction of wave
propagation.
- P waves have highest speed.
- Volumetric change
- Sound is an example of a P wave.
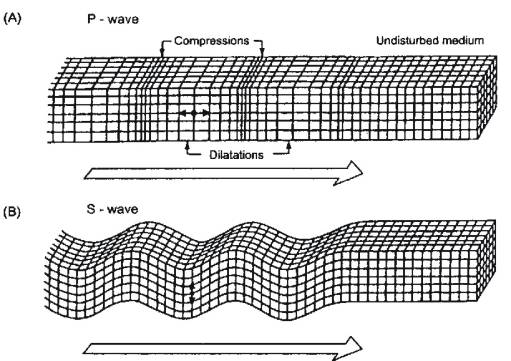
B) S waves (Secondary, Shear, Shake)
Particle motion is in plane perpendicular to direction of
propagation.
- If particle motion along a line in perpendicular
plane, then S wave is said to be plane
polarised: SV in vertical
plane, SH horizontal.
- No volume change
- S waves cannot exist in fluids like water or
air, because the fluid is unable to support shear stresses.
Seismic Surface Waves
No stresses act on the Earth's surface (Free surface), and two types of surface wave can
exist
A) Rayleigh waves
- Propagate along the surface of Earth
- Amplitude decreases exponentially with depth.
- Near the surface the particle motion is
retrograde elliptical.
- Rayleigh wave speed is slightly less than S
wave: ~92% VS.
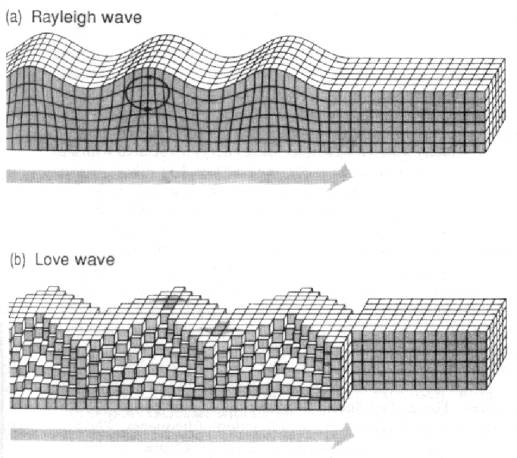
B. Love waves
Occur when a free surface and a deeper interface are
present, and the shear wave velocity is lower in the top layer.
- Particle
motion is SH, i.e.
transverse horizontal
- Dispersive
propagation: different
frequencies travel at different velocities, but usually faster than
Rayleigh waves.
Seismic Wave Velocities
The speed of seismic waves is related to the elastic
properties of solid, i.e. how easy it is to strain the rock for a given stress.
- Depends on density, shear modulus, and axial modulus
Speed of wave propagation is NOT speed at which particles
move in solid ( ~ 0.01 m/s ).
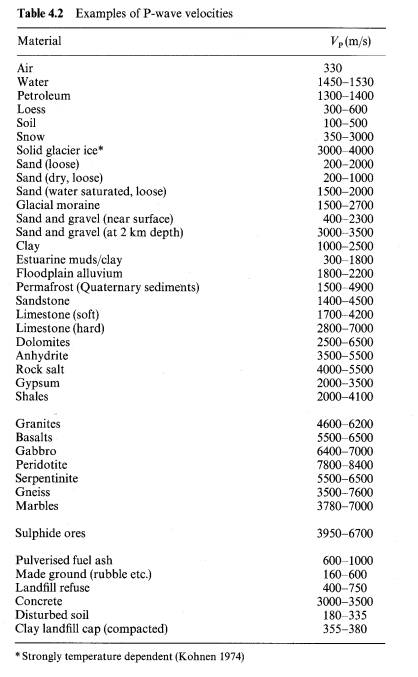
Constraints on Seismic Velocity
Seismic velocities vary with mineral content, lithology,
porosity, pore fluid saturation, pore pressure, and to some extent temperature.
Igneous/Metamorphic Rocks
In igneous rocks with minimal porosity, seismic velocity
increases with increasing mafic mineral content.
Sedimentary Rocks
In sedimentary rocks, effects of porosity and grain
cementation are more important, and seismic velocity relationships are complex.
Various empirical relationships have been estimated from
either measurements on cores or field observations:
1) P wave velocity as function of age and depth
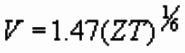 km/s
km/s
where Z is depth in km and T is geological age in millions
of years (Faust, 1951).
2) Time-average equation
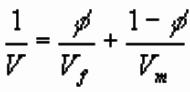
where f is porosity, Vf and Vm
are P wave velocities of pore fluid and rock matrix respectively (Wyllie,
1958).
- Usually Vf ≈ 1500 m/s, while Vm
depends on lithology.
- If the velocities of pore fluid and matrix
known, then porosity can be estimated from the measured P wave velocity.
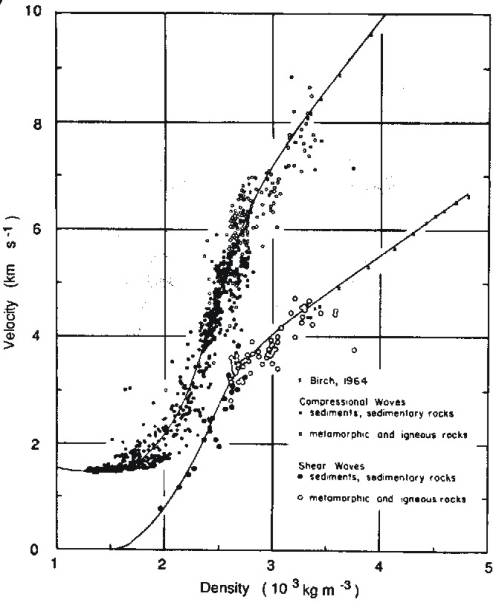
Nafe-Drake Curve
An important empirical relation exists between P
wave velocity and density.
- Crossplotting velocity and density values of
crustal rocks gives the Nafe-Drake curve after its discoverers.
- Only a few rocks such as salt (unusually low density) and sulphide ores (unusually high densities)
lie off the curve.
Waves and Rays
In a homogeneous, isotropic
medium, a seismic wave propagates away from its source at the same speed in
every direction.
- The wavefront is the leading
edge of the disturbance.
- The ray is the normal to the wavefront.
Huygen’s Principle
Every point on a wavefront can be considered a secondary source of spherical waves, and the
position of the wavefront after a given time is the envelope of these secondary
wavefronts.
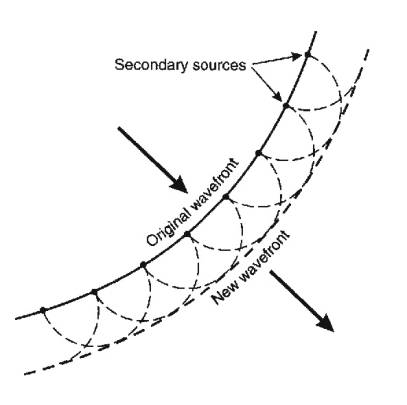
- Huygen’s construction can be used to explain
reflection, refraction and diffraction of waves
- However, it is often simpler to consider wave
propagation in terms of rays, though they cannot explain some effects such
as diffraction into shadow zones.
Reflection and Refraction at Oblique Incidence
When a P wave is incident on a boundary, at which elastic
properties change, two reflected waves (one P, one S) and two transmitted waves
(one P, one S) are generated.
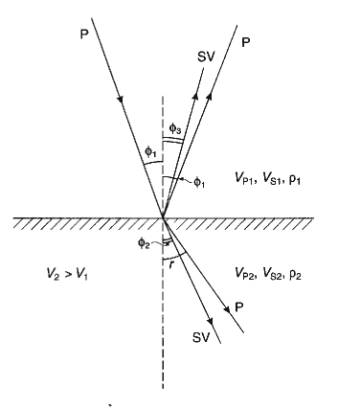
Angles of transmission and reflection of the S waves are
less than the P waves.
Snell’s Law
Exact angles of transmission and reflection are given by:
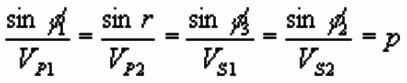
p is known as the ray parameter.
Critical Angles
There are two critical angles corresponding to when
transmitted P and S waves emerge at 90°.
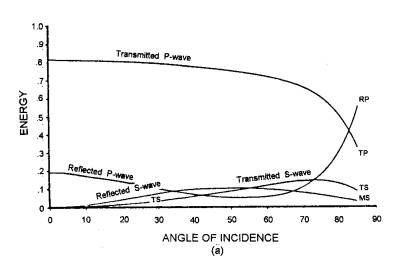
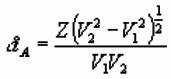
Amplitude of Reflected and Transmitted Waves
At oblique incidence, energy transformed between P and S
waves at an interface.
Amplitudes of reflected and transmitted waves vary with
angle of incidence in a complicated wave given by Zoeppritz
equations.
Example
P wave reflection amplitude can increase at top of gas sand.
Wave Incident on Low Velocity Layer (No critical point)
Wave Incident on High Velocity Layer (P and S critical
point)
Normal Incidence Reflection Amplitudes
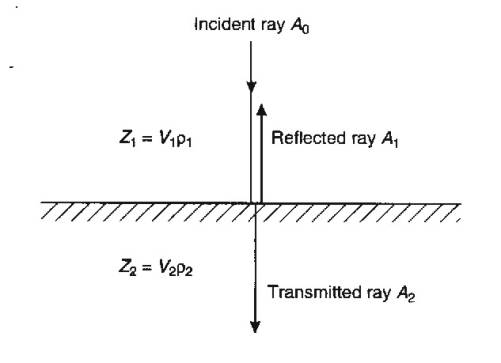
When angle of incidence is zero, amplitudes of reflected and
transmitted waves simplify to the expressions below.
Reflection Coefficient:
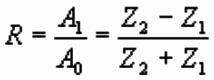
Transmission Coefficient:
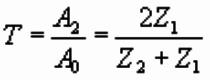
where Z is the acoustic (P
wave) impedance of the layer, and is given by Z = Vr, where V is the P wave velocity and r the density.
- Same formulae apply to S waves at normal
incidence.
Critical Refraction
When seismic velocity increases at an interface (V2>V1),
and the angle of incidence is increased from zero, the transmitted P wave will
eventually emerge at 90°.
- Refracted wave travels along the upper boundary
of the lower medium.
Head Waves
The interaction of this wave with the interface produces
secondary sources that produce an upgoing wavefront, known as a head wave, by Huygen’s principle.
The ray associated with this head wave emerges from the
interface at the critical angle.

This phenomenon is the basis of the refraction
surveying method.
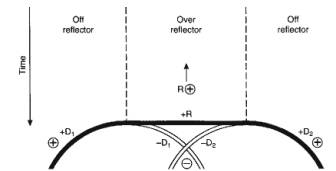
Diffractions
Reflection by Huygen’s Principle
When a plane wavefront is incident on a plane boundary, each
point of the boundary acts as a secondary source. The superposition of these
secondary waves creates the reflection.
Diffraction by Huygen’s Principle
If interface truncates abruptly, then secondary waves do not
cancel at the edge, and a diffraction is observed.
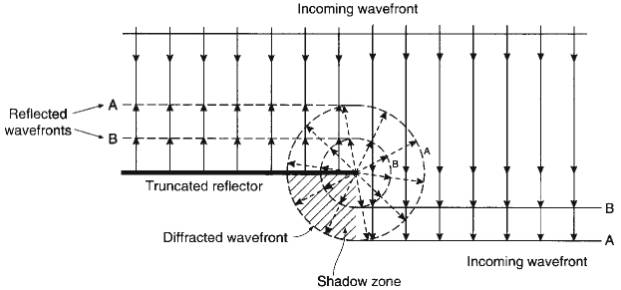
- This explains how energy can propagate into
shadow zones.
- A small scattering object in the subsurface such
as a boulder will produce a single diffraction.
- A finite-length interface will produce
diffractions from each end, and the interior parts of the arrivals will be
opposite polarity.
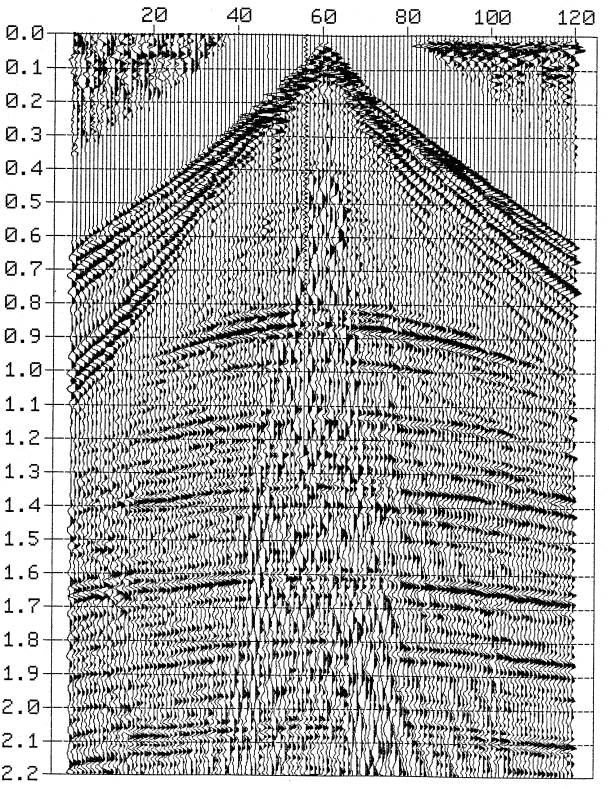
Seismic Field Record
Dynamite shot recorded using a 120-channel
recording spread
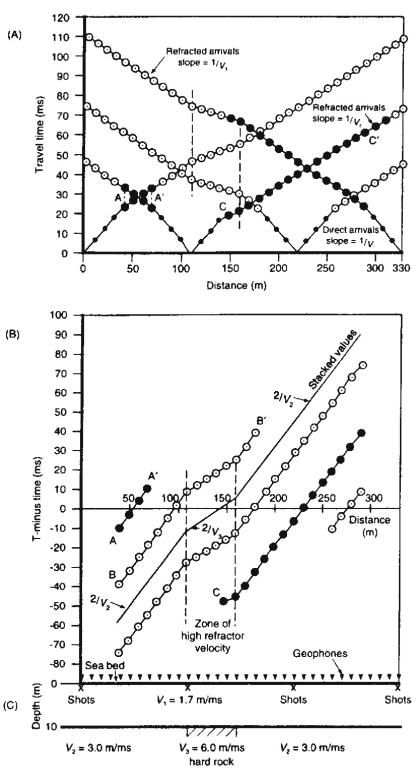
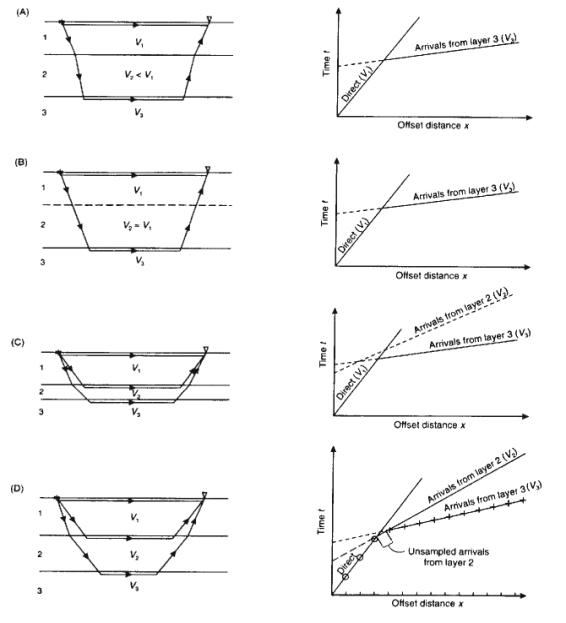
Seismic Refraction Surveying
Refraction surveys use the process of critical refraction to infer interface
depths and layer velocities.
Critical refraction requires an increase in velocity with
depth. If not, then there is no critical; refraction: Hidden layer problem.
- Geophones laid out in a line to record arrivals
from a shot. Recording at each geophone is a waveform called a seismogram.
- Direct signal from shot travels along top of
first layer.
- Critical refraction is also recorded at distance
beyond which angle of incidence becomes critical.
Example
For a shallow survey, 12-24 vertical 30 Hz geophones would
be laid out to record a hammer or shotgun shot.
First Arrival Picking
In most refraction analysis, we only use the travel times of
the first arrival on each recorded seismogram.
As velocity increases at an interface, critical refraction
will become first arrival at some source-receiver offset.
First Break Picking
The onset of the first seismic wave, the first break, on each seismogram is identified
and its arrival time picked.
Example of first break picking on Strataview
field monitor
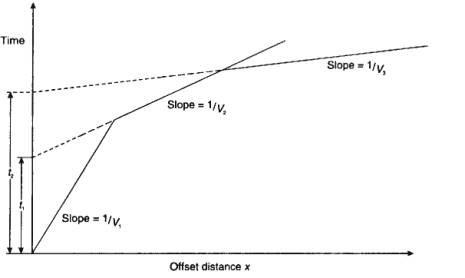
Travel Time Curves
Analysis of seismic refraction data is primarily based on
interpretation of critical refraction travel times.
Plots of seismic arrival times vs. source-receiver offset
are called travel time curves.
Example
Travel time curves for three arrivals shown previously:
- Direct arrival from source to receiver in top
layer
- Critical refraction along top of second layer
- Reflection from top of second layer
Critical Distance
Offset at which critical refraction first appears.
- Critical refraction has same travel time as
reflection
- Angle of reflection same as critical angle
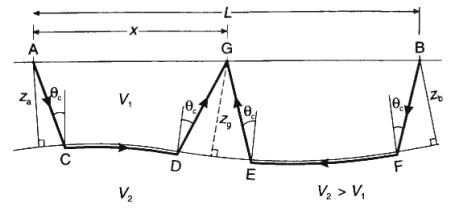
Crossover Distance
Offset at which critical refraction becomes first arrival.
Field Surveying
Usually we analyse P wave refraction data, but S wave data
occasionally recorded
Land Surveys
Typically 12 or 24 geophones are laid out to record a shot
along a cable, with takeouts to which
geophones can be connected.
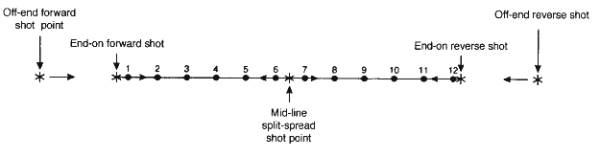
- Geophones and cable comprise a spread.
- Shot would
usually be placed at one end of spread for first recording, then second
recording made at other end.
- Off-end and split-spread shooting also possible.
Marine Surveys
Shot firing and seismograph recording systems are housed on
a boat.
Two options for receivers:
A) Bottom-cable:
- Hydrophones contained in a ~55 m cable which is
deployed or dragged along bottom of river or seabed.
B) Sonobouys
- Hydrophone is suspended from floating buoy containing
radio telemetry to transmit seismogram to boat.
- Boat steams away from sonobouy firing an airgun.
Interpretation of Refraction Traveltime Data
After completion of a refraction survey first arrival times
are picked from seismograms and plotted as traveltime curves
Interpretation objective is to infer interface
depths and layer velocities
Data interpretation requires making assumption
about layering in subsurface: look at shape and number of different first
arrivals.
Assumptions
- Subsurface composed of stack of layers, usually
separated by plane interfaces
- Seismic velocity is uniform in each layer
- Layer velocities increase in depth
- All ray paths are located in vertical plane,
i.e. no 3-D effects with layers dipping out of plane of profile
Analysis based on considering critical refraction raypaths
through subsurface.
[There are more sophisticated
approaches to handle non-uniform velocity and 3-D layering.]
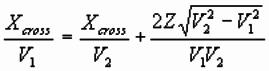
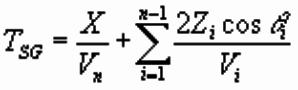
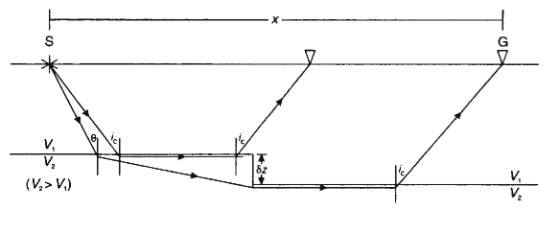
Planar Interfaces: Two Layers
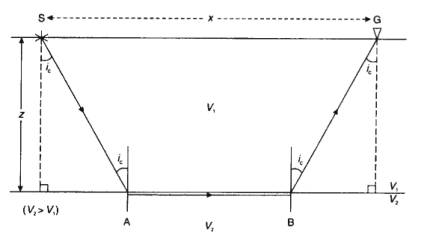
For critical refraction at top of second layer,
total travel time from source S to receiver G is given by:
![]()
Hypoteneuse and horizontal side of end 90o-triangle
are:
![]() and
and
![]() respectively.
respectively.
So, as two end triangles are the same:
At critical angle, Snell’s law becomes: 
Substituting for V1/ V2,
and using cos2q +
sin2q = 1:
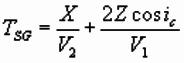
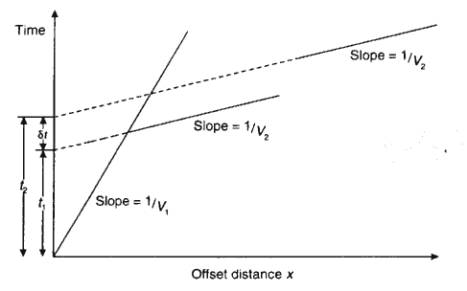
This equation represents a straight line of slope
1/V2 and intercept
Interpretation of Two Layer Case
From traveltimes of direct arrival
and critical refraction, we can find velocities
of two layers and depth to interface:
1. Velocity of layer 1 given by slope
of direct arrival
2. Velocity of layer 2 given by slope
of critical refraction
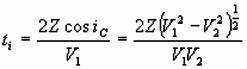
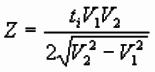
3. Estimate ti from plot and
solve for Z:
Depth from Crossover Distance
At crossover point, traveltime of direct and refraction are
equal:
Solve for Z to get:
[Depth to interface is always less than half the
crossover distance]
Planar Interfaces: Three Layer Case
In same way as for 2-layer case, can consider
triangles at ends of raypath, to get expression for traveltime.
After simplification as before:
![]()
The cosine functions can be expressed in terms of
velocities using Snell’s law along raypath of the critical refraction:

Again traveltime equation is a straight line,
with slope 1/V3 and intercept time t2.
Warning:
q1 is NOT the critical angle for refraction
at the first interface.
It is an angle of incidence along a completely
different raypath!
Interpretation of Three Layer Case
In three layer case, the arrivals are:
1. Direct arrival in first layer
2. Critical refraction at top of
seconds layer
3. Critical refraction at top of third
layer
Because, intercept time of traveltime curve from third layer
is a function of the two overlying layer thicknesses, we must solve for these
first.
Use a layer-stripping approach:
1. Solve two-layer case
using direct arrival and critical refraction from second layer to get thickness
of first layer.
2. Solve for thickness of
second layer using all three velocities and thickness of first layer just
calculated.
Planar Interfaces: Multi-Layer Case
For a subsurface of many plane horizontal layers,
the planar interface travel time equation can be generalised to:
where qi is the angle of incidence at the ith interface,
which lies at depth Zi at the base of a layer of velocity Vi.
Interpretation
Proceeds by a layer-stripping approach, solving
two-layer, three-layer, four-layer etc. cases in turn.
Dipping Planar Interfaces
When a refractor dips, the slope of the traveltime curve does not represent the
"true" layer velocity:
- shooting updip, i.e. geophones are on updip
side of shot, apparent refractor velocity is higher
- shooting downdip apparent velocity is lower
To determine both the layer velocity and the interface dip, forward and reverse
refraction profiles must be acquired.
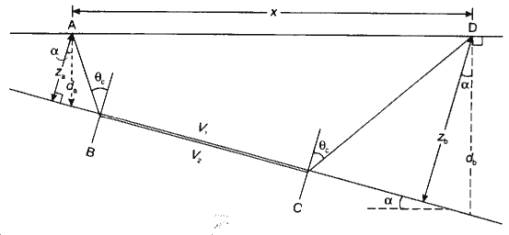
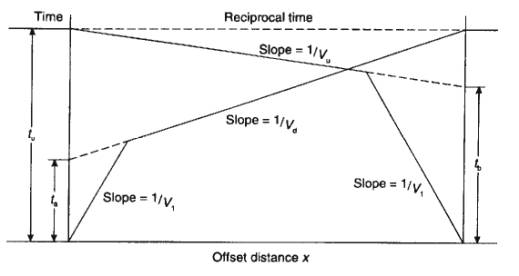
Note: Travel times are equal in forward and
reverse directions for switched, reciprocal, source/receiver positions.
Dipping Planar Interface: Two Layer Case
Geometry is same as flat 2-layer case, but rotated
through a,
with extra time delay at D. So traveltime is:

Formulae for up/downdip times are (not proved
here):


where Vu/ Vd and tu/
td are the apparent refractor velocities and intercept times.
 ;
;
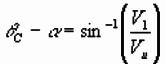
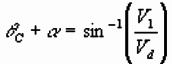
Can now solve for dip, depth and velocities:
1) Adding and subtracting, we can solve for
interface dip a and critical angle qC:
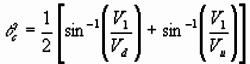 ;
;
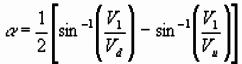
[V1 is known from direct arrival, and
Vu and Vd are estimated from the refraction traveltime
curves]
2) Can find layer 2 velocity from Snell’s law: 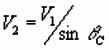
1. Can get slant interface
depth from intercept times, and convert to vertical depth at source position:
 ;
;
Faulted Planar Interface
If refractor faulted, then there will be a sharp
offset in the travel time curve:
Can estimate throw on fault from offset in
curves, i.e. difference between two intercept times, from simple formula:
Interpretation of Realistic Traveltime Data
With field data it is necessary to examine traveltime curves
carefully to decide on best method to use:
- How many refraction branches
are there, i.e. how many layers?
- Are anomalous times due to
mispicking or real?
- Small anomalies can be ignored,
but larger ones require other methods, e.g. Plus-Minus.
- Multiple source positions allow,
some inference of depth of anomaly: near-surface anomalies align
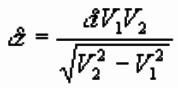
Surface Topography Intervening Velocity Anomaly
Refractor Topography Refractor Velocity Variation
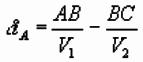
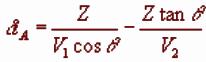
Delay Times
For irregular traveltime curves, e.g. due to bedrock
topography or glacial fill, much analysis is based on delay times.
Total Delay Time
Difference in traveltime along actual raypath
and projection of raypath along refracting interface:
![]()
![]() ;
; 
Total delay time is delay time at shot plus delay time at geophone:

For small dips, can assume x=xI and:
![]()
Refractor Depth from Delay Time
If velocities of both layers are known, then refractor depth
at point A can be calculated from delay time at point A:
Using RH triangle to get lengths in terms of z:
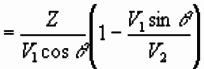
Using Snell’s law to express angles in terms of
velocities:
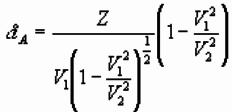
Simplifying:
So refractor depth at A is:
Varying Interface & Refractor Velocity:
Plus-Minus Method
Hagedoorn’s Plus-Minus method used for more complex cases:
- Undulating interfaces
- Changes in refractor velocity along the profile
Plus-Minus:
- Requires forward and reverse
travel times at geophone location to find delay time and refractor
velocity at geophone
- Assumes interface is planar
between D and E, can result in smoothing of actual topography
- Assumes dips less than ~10o.
Delay time at G given by:
![]()
which can be found from observed data.
Plus and Minus Terms
Using previous figure can write down forward/
reverse traveltimes:
Minus Term
Used to determine laterally varying refractor
velocity, i.e. V2(x):

- Velocity given by local slope
of plot of (T-) vs. x, distance along profile. Note factor of 2
compared with the plane layer method.
- Velocity may change along
profile, so written as V2(x). Different values of V2
can be used for calculation of interface depth using Plus term
Plus Term
Determines refractor depth at a location from
delay time there:
![]()
So from delay time formula for depth, depth at G
given by:
- Depth can be determined at each
geophone location where forward and reverse traveltimes recorded using V2
estimated for that position
Plot of Minus Term
A. Composite traveltime
distance plots for four different shots
B. Plot of Minus Terms: note
lateral changes in refractor velocity
Hidden Layer Problem
Layers may not be detected by first arrival analysis:
A. Velocity inversion
produces no critical refraction from layer 2
B. Insufficient velocity
contrast makes refraction difficult to identify
C.Refraction from thin layer does not become first arrival
D.Geophone spacing too large to identify second refraction
Seismic Refraction Energy Sources
Source for a seismic survey source has to be chosen bearing in
mind the possible signal attenuation that can occur, often a function of the
geology.
Requirements
- Sufficient energy to generate a measurable
signal at receiver
- Short duration pulse, i.e. containing enough
high frequencies, to resolve the desired subsurface layering
- Repeatable source with a known, consistent
waveform
- Minimal mechanical noise
- Ease of operation
There are many different seismic refraction
sources, but the most important are:
On land:
sledge hammer, weight drop, shotgun (shallow
work)
dynamite (crustal studies)
At sea:
airgun (oil exploration, crustal
studies)
Land Seismic Sources: Mechanical
Sledge Hammer
A sledge hammer is struck against a metal plate:
- Vertically down on plate to generate P waves
- Horizontally against side of plate to produce S
waves
Inertial switch on hammer triggers data recording on impact.
- Problems with repeatability and possible
bouncing of hammer.
- Used for refraction spreads up to 200 m.
Accelerated weight–drop
Mechanical system, using compressed air or thick elastic
slings, forces weight onto baseplate with greater force

- Better repeatability than sledge hammer
Land Seismic Sources: Explosive
Buffalo Gun
Metal pipe inserted up to 1 m into the ground, and a blank
shotgun cartridge fired.
Exploding gases from gun impact ground and generate the
seismic pulse.
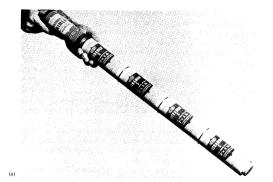
Dynamite
Shot holes up to 30 m are drilled, and loaded with dynamite,
which usually comes in 0.5 m plastic cylinders that can be screwed together.
Marine Seismic Sources: Airgun
Airguns are most common seismic source used at sea.
Essentially, an airgun is a cylinder that is filled with compressed
air, and then releases the air into the water.
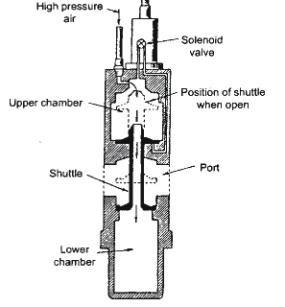
The sudden release of air creates a sharp pressure impulse
in the water.
Airgun Bubble Oscillation
1. Air bubble from airgun
expands until pressure
of surrounding water overcomes its expansion, and forces it to contract.
2. Bubble then collapses, compressing the air until the air
pressure exceeds the water pressure, and the bubble can expand again.
3. Expansion and collapse
continues as bubble rises to surface, giving oscillatory signal characteristic of single airgun.

- Airguns are usually deployed at a depth of a few
metres, so there is always a reflection from sea surface, called the ghost.
- The sea surface RC is –1, so ghost is almost as
strong as original signal, producing a trough-peak response.
Land Sensor: The Geophone
Geophone is essentially only type of sensor used on land.
A geophone comprises a coil suspended from
springs inside a magnet.
When the ground vibrates in response to a passing seismic
wave, the coil moves inside the magnet, producing a voltage, and thus a
current, in the coil by induction.
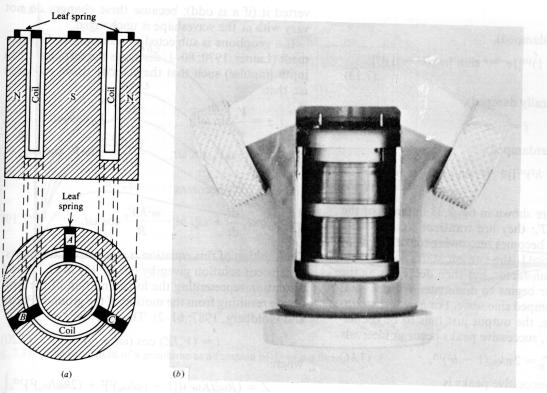
- As coil can only move in one direction, usually
vertical, the geophone only senses the component
of seismic motion along axis of coil.
- Three orthogonal geophones necessary to fully
characterise seismic ground motion.
- Geophones respond to the rate of
movement of the ground, i.e. particle velocity, and are often laid in arrays of several
phones.
Principle of Geophone
Geophone Damping
As geophone coil moves inside magnet, current induced in coil
produces a magnetic field that opposes, i.e. damps,
the movement of the coil.
- If a geophone is tapped, the oscillation of coil
will die out.

- At critical damping, coil will
return to rest most quickly.
- If damping very small, coil will
oscillate at the natural frequency of the electromechanical system.
- Normal damping is 70% critical.
Natural Frequency
Natural frequency and damping affect the range of
frequencies the geophone can record:
- 14 Hz geophones used in oil exploration
- 30 Hz geophones used in high resolution studies
- 100 Hz geophones used in very shallow work
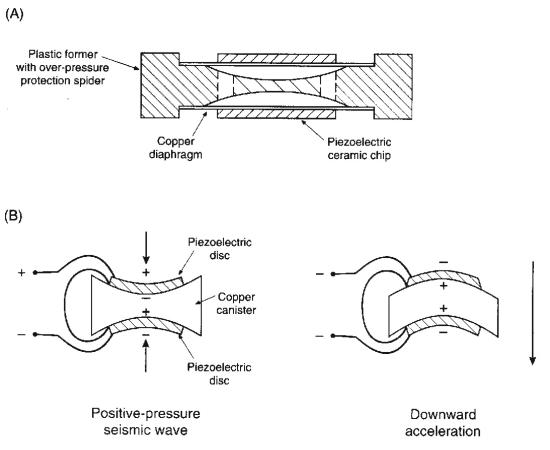
Marine Sensor: The Hydrophone
Hydrophones used to detect the pressure
variations in water due to a passing seismic wave.
A hydrophone comprises two piezoelectric ceramic
discs cemented to a sealed hollow canister.
- A pressure wave squeezes the canister, bending
the ceramic and generating a voltage.
- The two discs are connected in series so that
the output generated by acceleration of the hydrophone cancels
- Pressure will squeeze ceramics and so produce
output.
Recording Instruments
Electrical output from geophone, i.e. voltage, is digitised
by recording instrumentation and written onto tape or disk.
Data are viewed on monitor records in field to check
quality.
Many different type of recording instrument available.
Example (Strataview, Geometrics)
Face of a Strataview seismograph commonly used in shallow
seismic work, and able to record up to 24 channels.
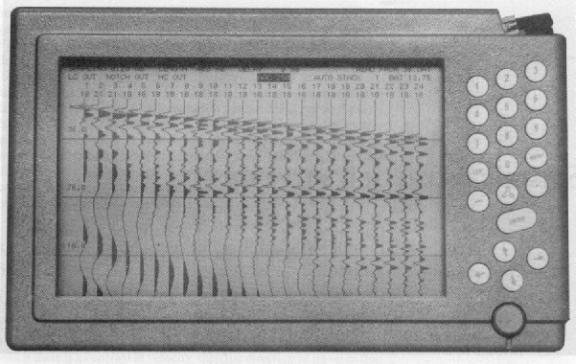
Recording Channel
Channel refers to electrical input to recording system.
Might be from a single geophone as in engineering work, or a group of 9
geophones, common in oil exploration.
- In oil exploration work, recording systems can
record up to 8000 channels.
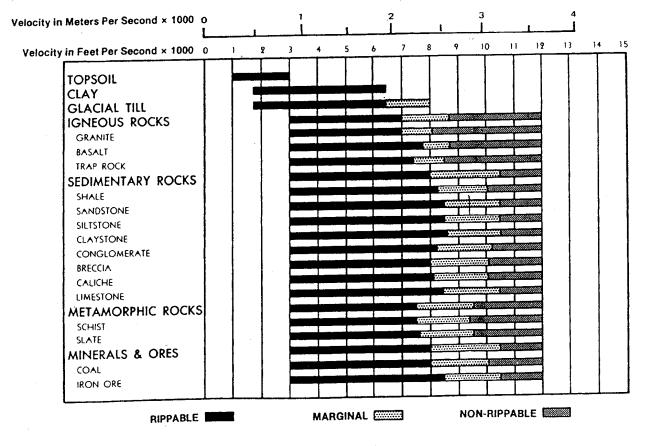
Application to Assessment of Rock Quality
Seismic refraction most commonly employed where velocities
increase suddenly with depth, e.g. determining depth to bedrock.
From the estimated layer velocities estimates of rock
strength and excavation difficulty can be made.
- Rippability is ease with which ground can
be excavated with a mechanical digger, varies with tractor size and power.
- In 1958, the Caterpiller Tractor Company began
using seismic velocities from refraction experiments to estimate
rippability.
Rippability for various common rocks:
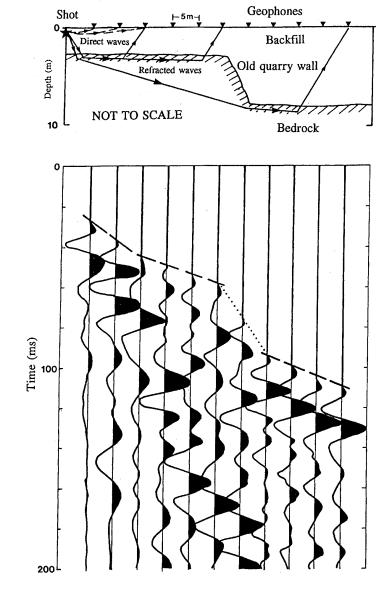
Application to Landfill Investigation 1
Seismic methods rarely used in landfills, because seismic
waves are often attenuated in the unconsolidated materials.
- Most landfills comprise hole excavated into
bedrock, filled with waste, and covered by an impermeable compacted clay
cap.
- Gases are then vented in a controlled fashion
through outlets.
Fault analysis used to find quarry height from
offset in intercepts
Application to Landfill Investigation 2
Integrity of clay cap from refraction velocities
- Low P wave velocities used to identify fractures
in the clay cap that required repair.
- P wave velocities in the fractured zones were
around 370 m/s, compared with 740 m/s over unfractured areas.
- In some areas, not possible to obtain critical
refraction due to velocity in the fill being lower than in clay cap.
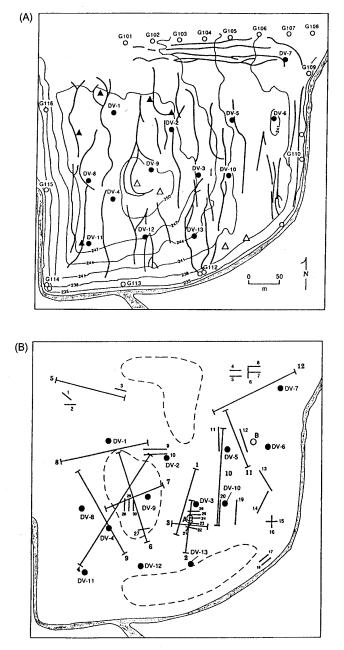
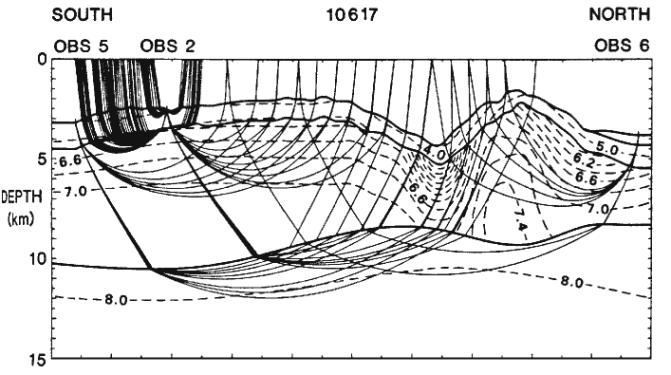
Application to Tectonics: Structure of Ocean Crust
Fracture zones comprise active transform faults located
between the ends of spreading segments on a midocean ridge, plus their lateral
extension
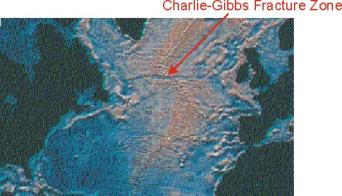
Fracture zones contain some of the most rugged topography on
Earth
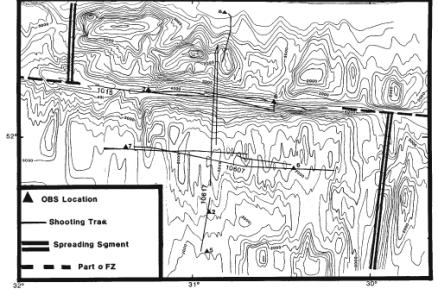
Crustal thickness can be measured by firing explosive shots
over seafloor deployed ocean-bottom
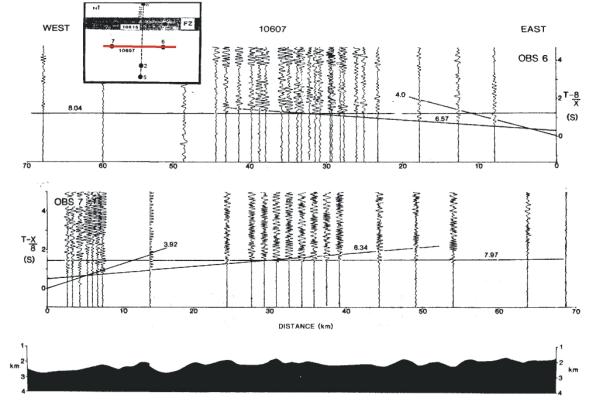
- Crustal refraction data usually
plotted using reduced travel time, i.e. a linear time shift.
- If vertical axis is T-X/8000, a
refraction with velocity of 8000 m s-1 will appear horizontal
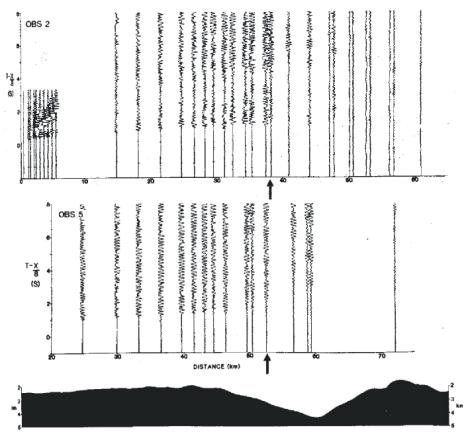
Reversed Refraction Profiles over Normal Ocean
Crust
Reversed Refraction Profiles along Fracture Zone
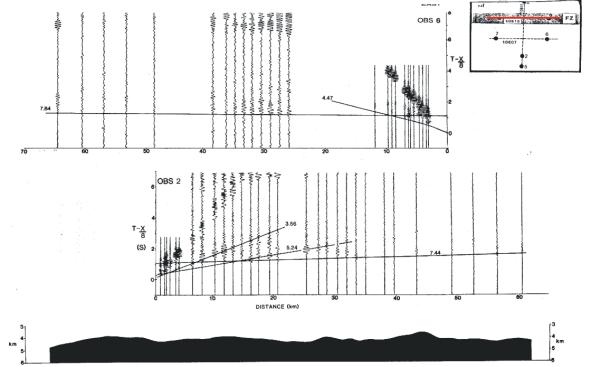
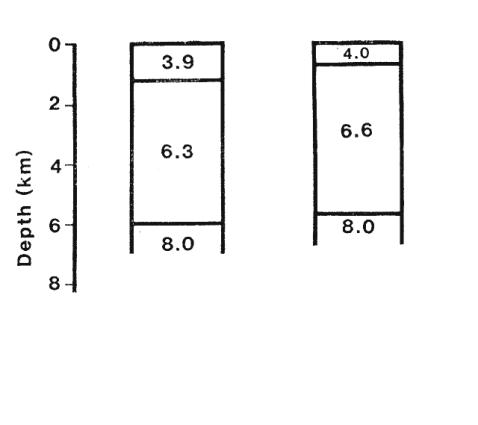
Plane Layer Solution for Normal Ocean Crust
OBS 7 OBS 6
Plane Layer Solution for Normal Fracture Zone
Crust
OBS 2 OBS 6
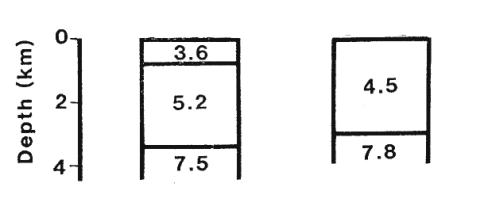
Fracture zone crust is thin and has low velocities due to
fracturing and hydrothermal circulation
Refraction Profile Orthogonal to Fracture Zone
Raytracing for Large Lateral Velocity Variations